Soap film mediated 3D Self-Assembly:
Suspended and Displacement Driven
geometries using centimeter-scale tiles
Alexandru Mihai
Supervisor: Prof. Eliot Fried
Mechanics and Materials Unit
July 22, 2022
Outline
The long and winding road (of research)
Acetone Droplets in a Leidenfrost state
Soap film singularities
Suspended rings
Classical Catenoid
Calculus of variations formulation
Experimental verification
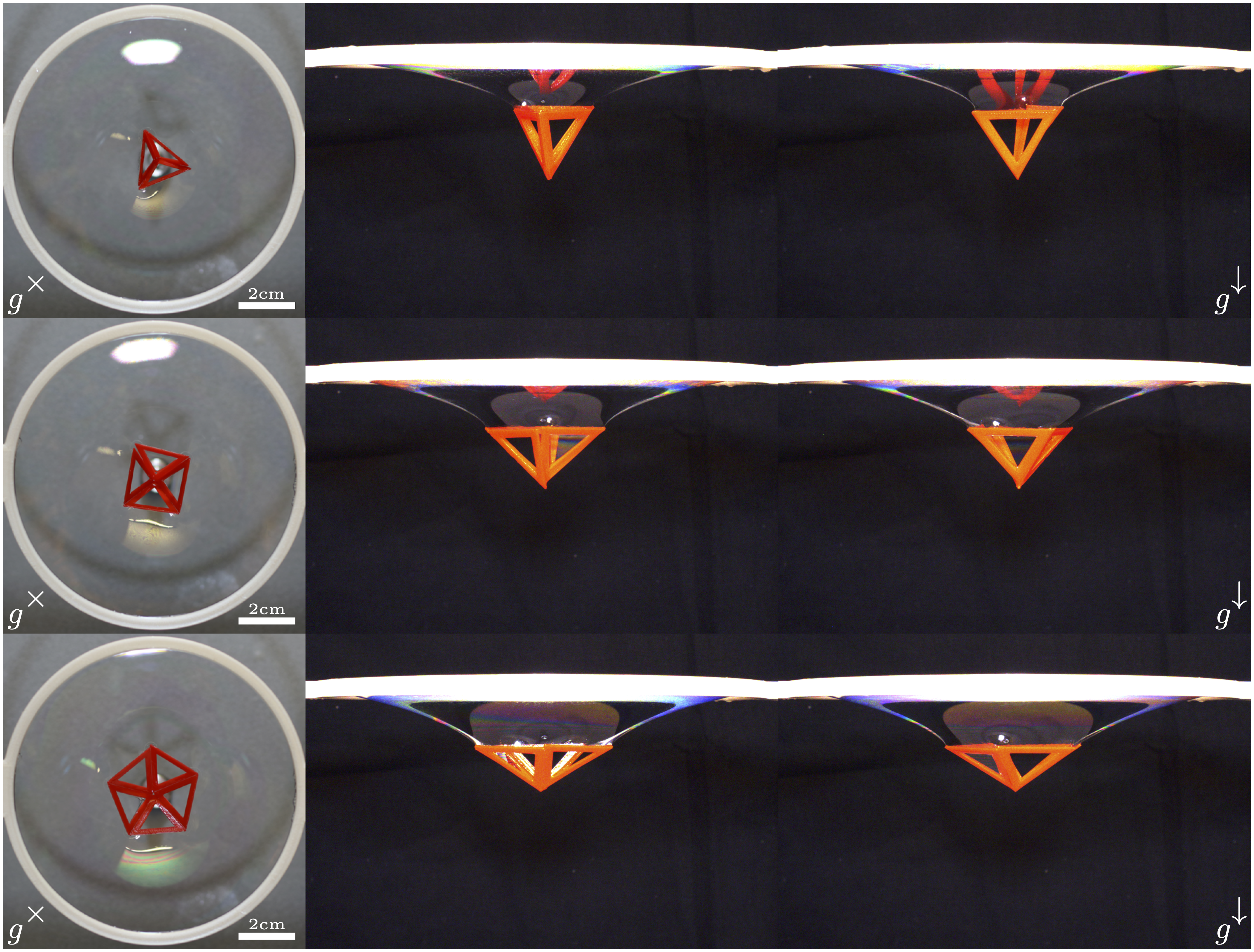
Gravity-mediated platonic solid assemblies
Surface Evolver simulations
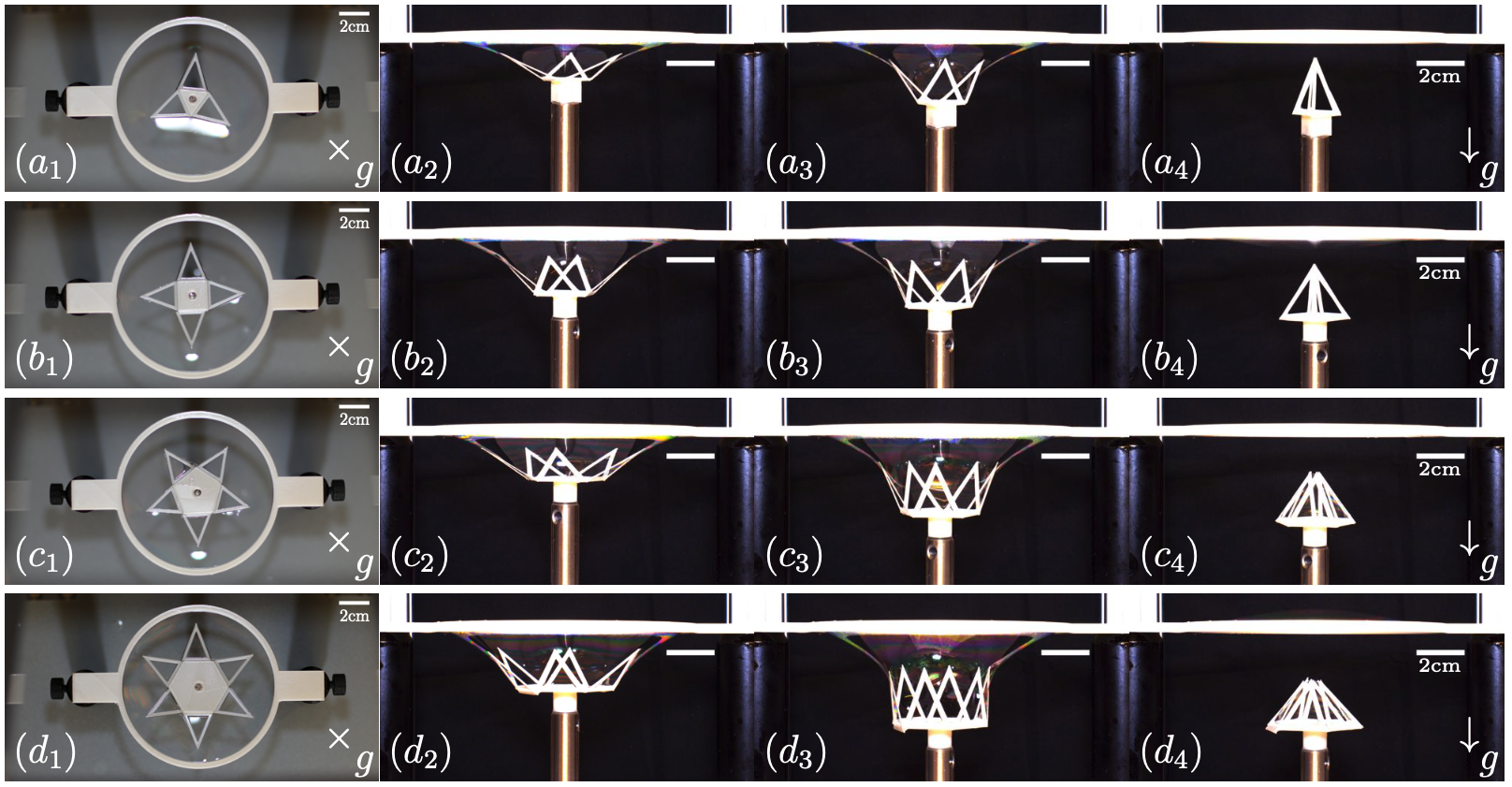
Displacement-driven prisms and pyramids
Transient tile angle simulations and modeling
Effective radii of structures
Additional geometries
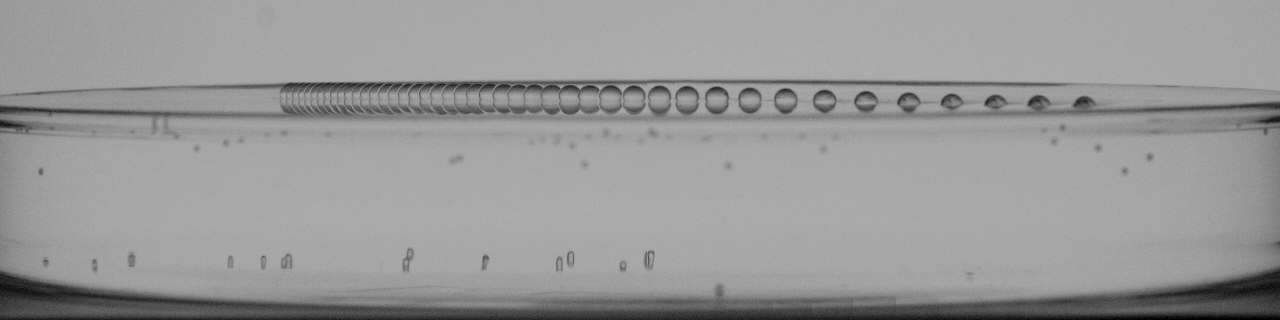
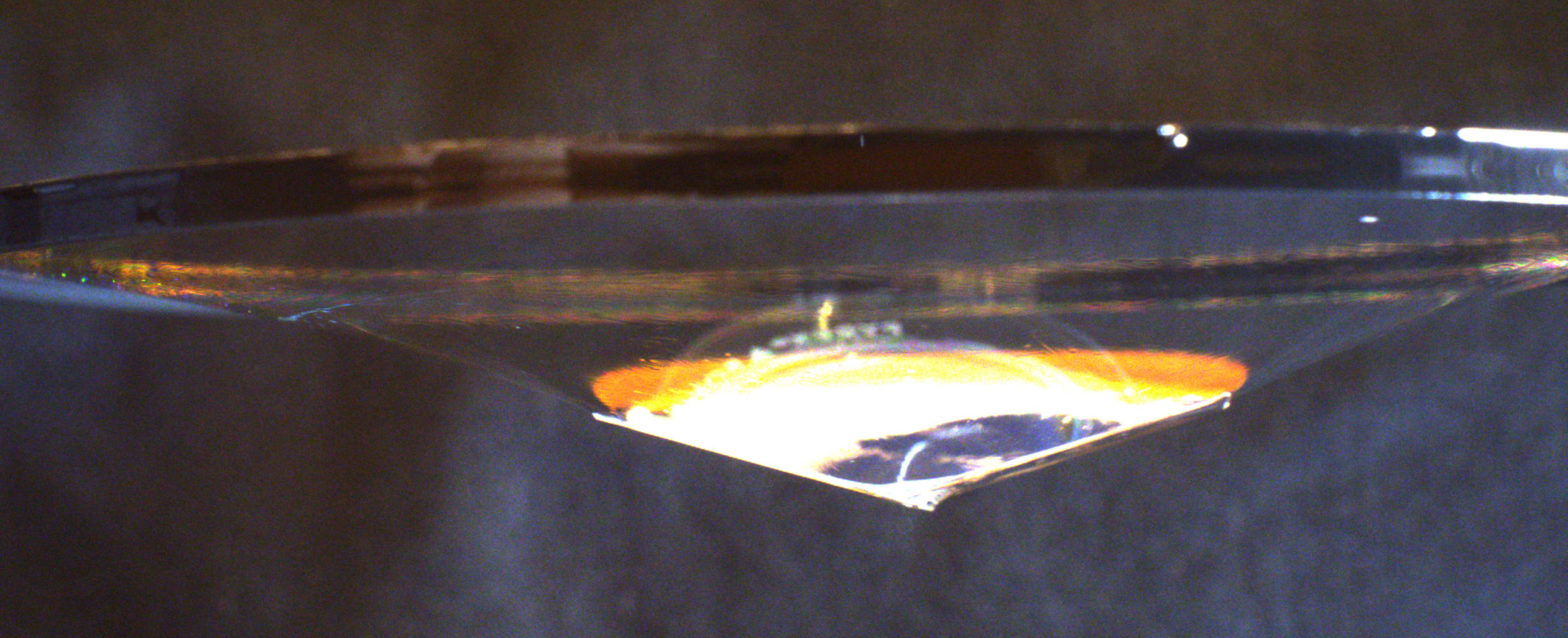
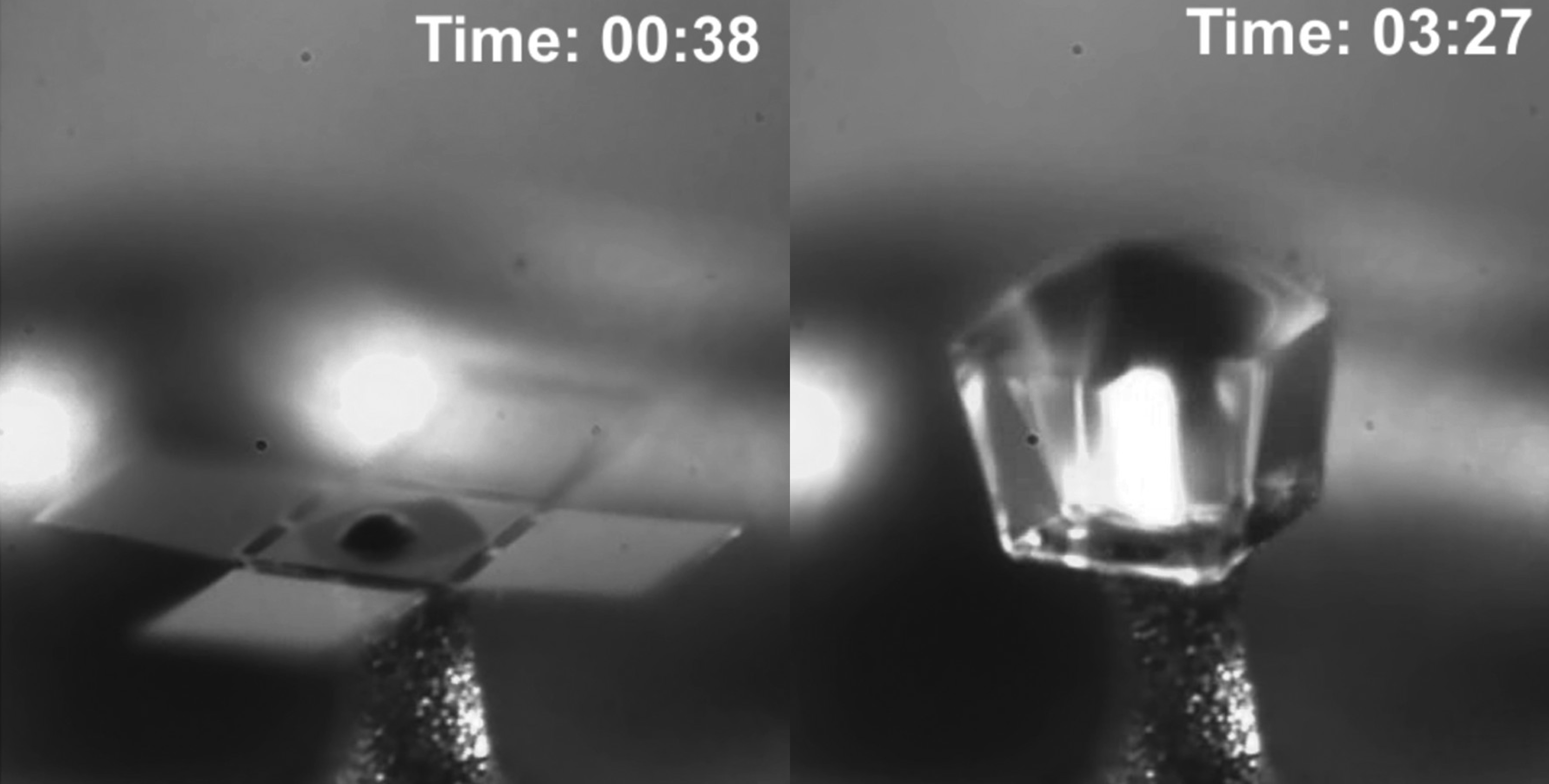
Starting Point: Leidenfrost Effect on a Liquid Substrate
Starting Point: Leidenfrost Effect on a Liquid Substrate
Superposition of 40 frames over an elapsed time of 1 second of an acetone droplet in a Leidenfrost state
on water heated to approximately 75 degrees celsius. The white dashed line shows the undisturbed free surface.
The tube visible at the far left is the deposition point, the droplets are approximately a 3 and 2.6 mm in diameter.
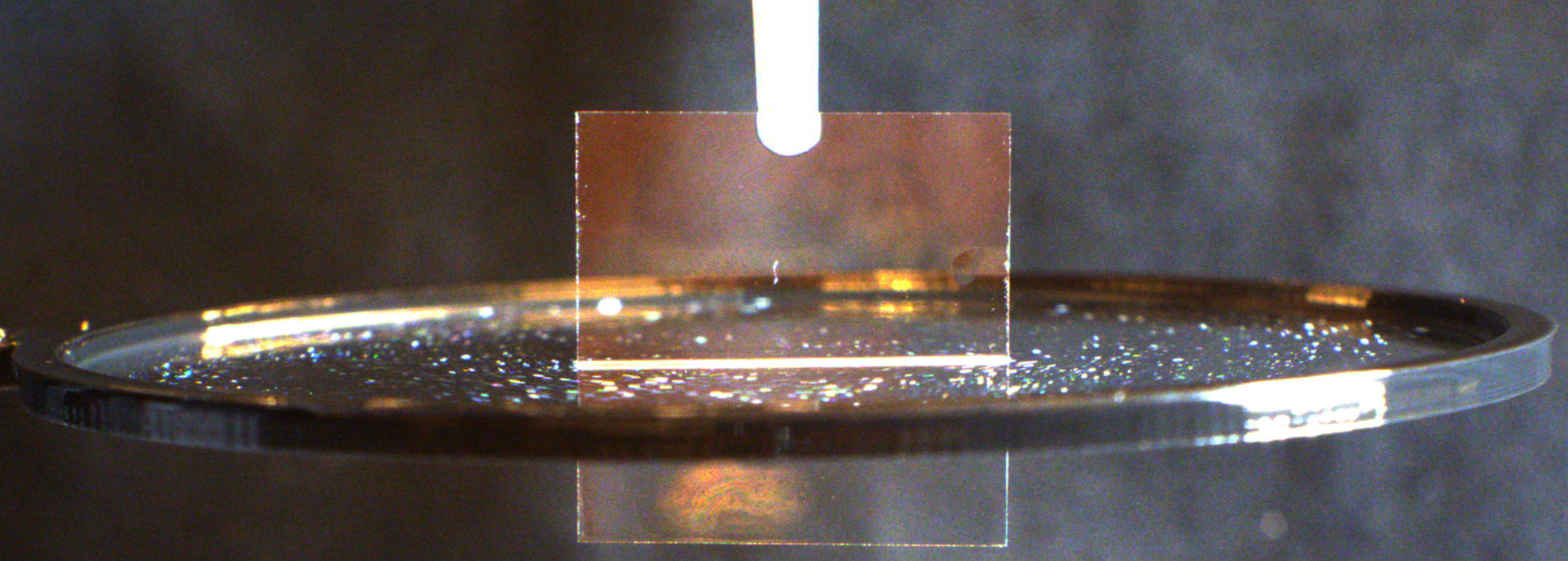
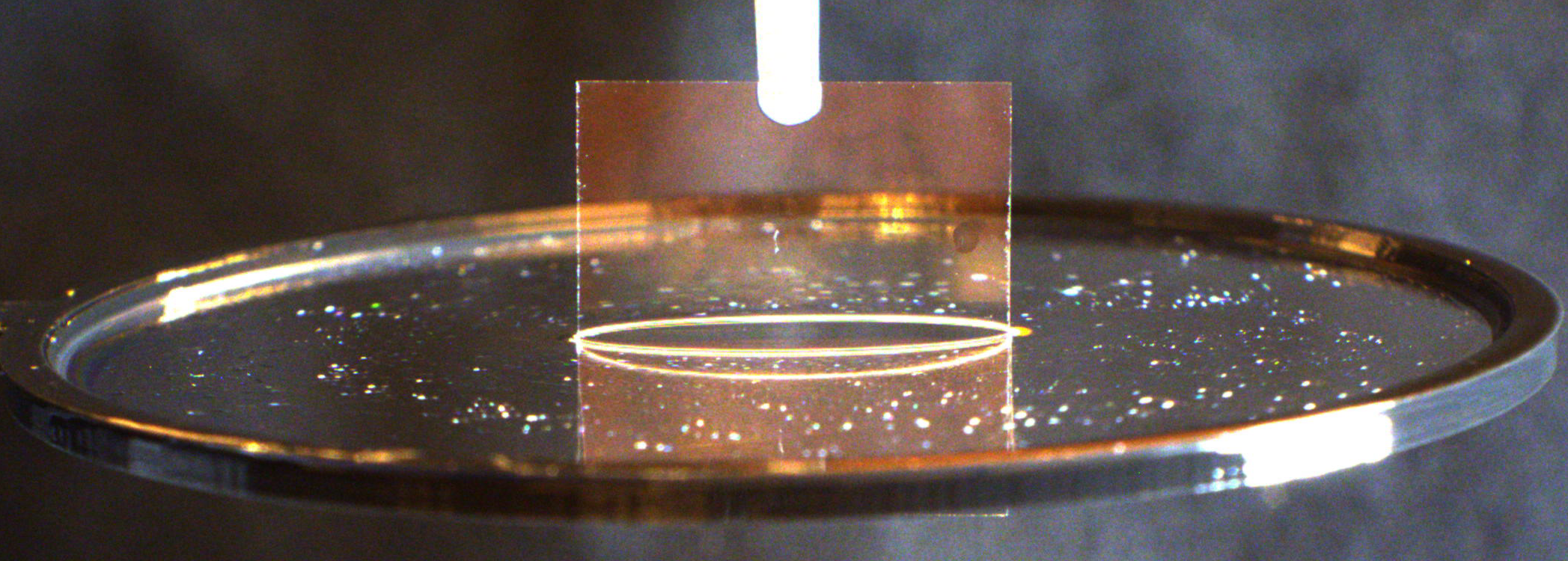
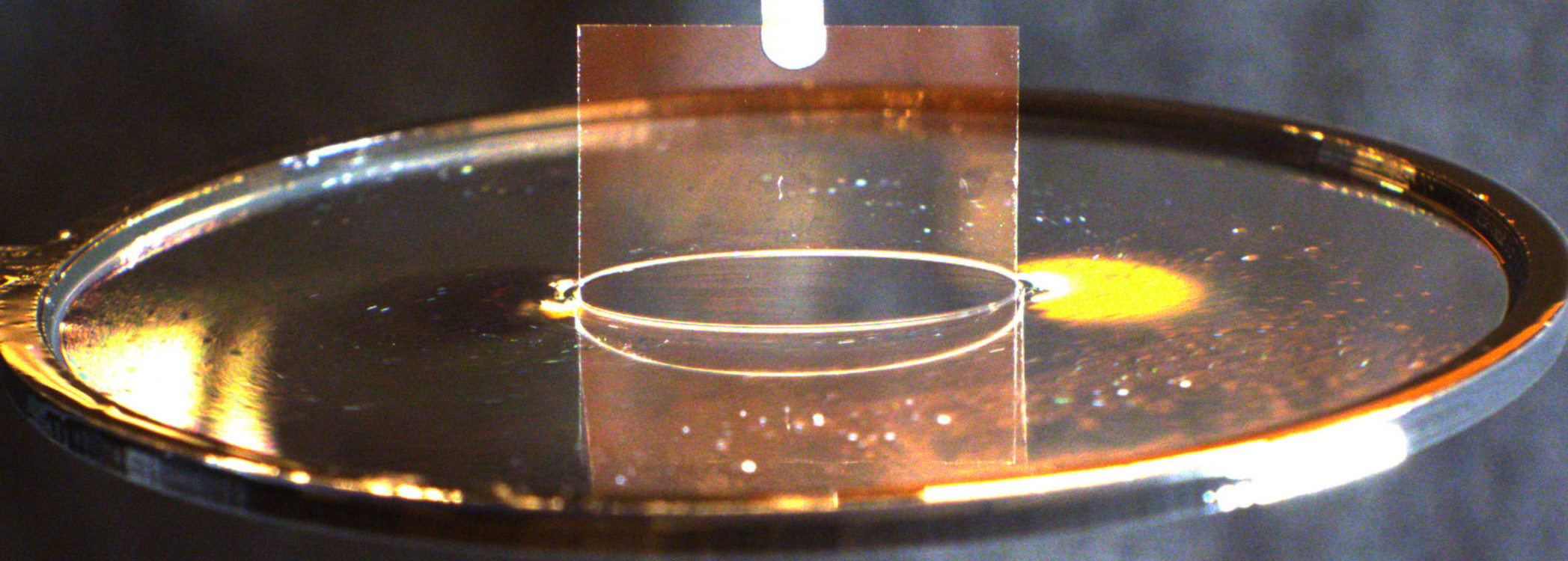
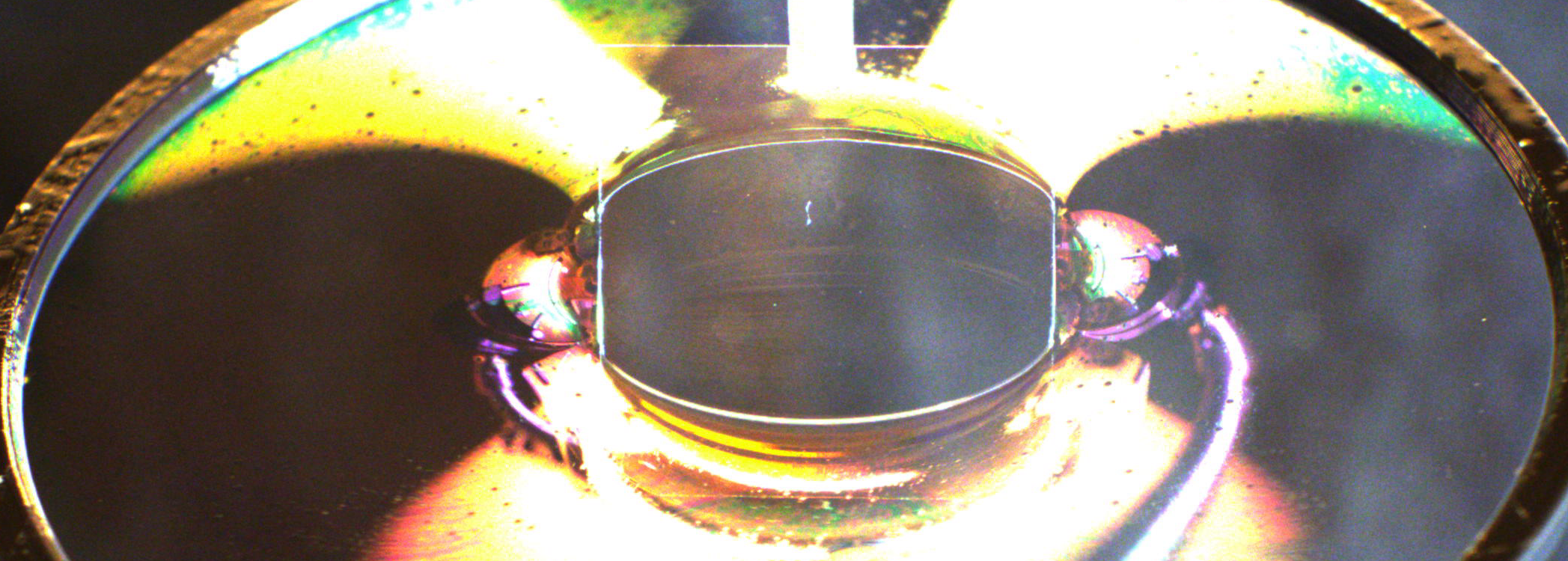
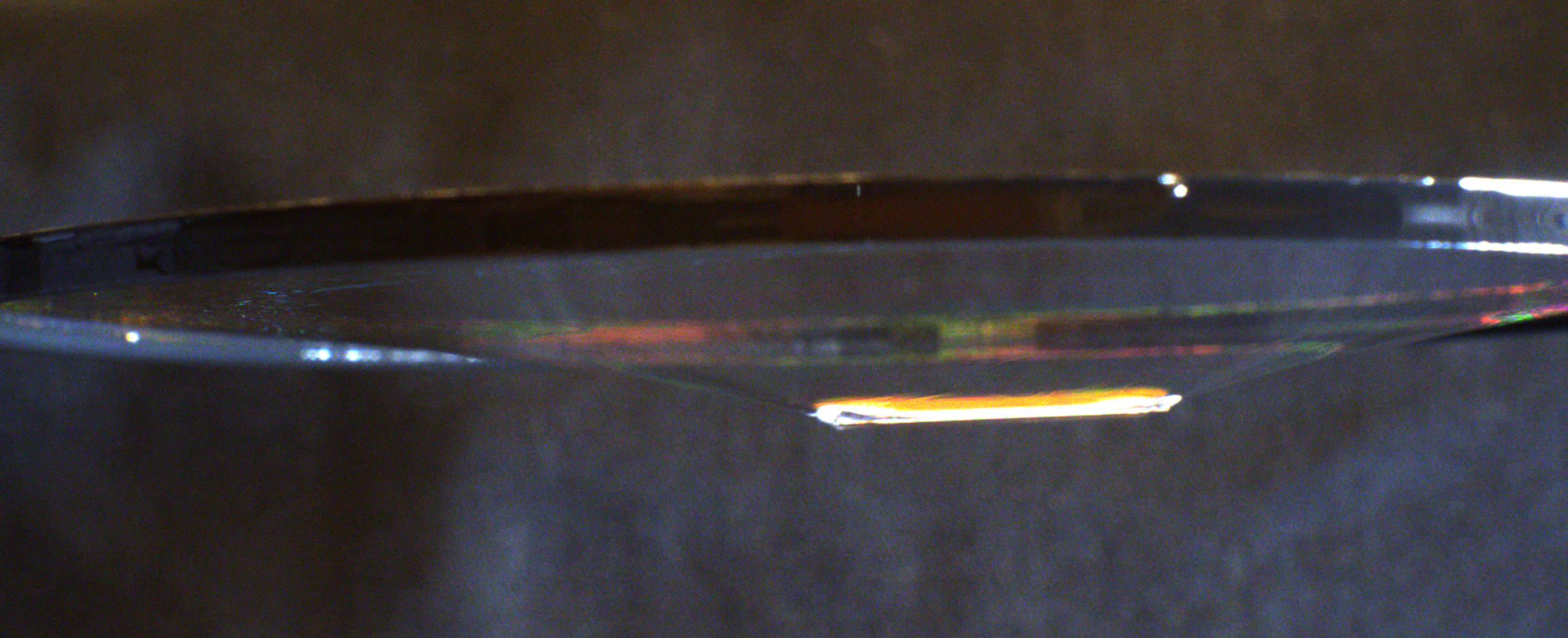
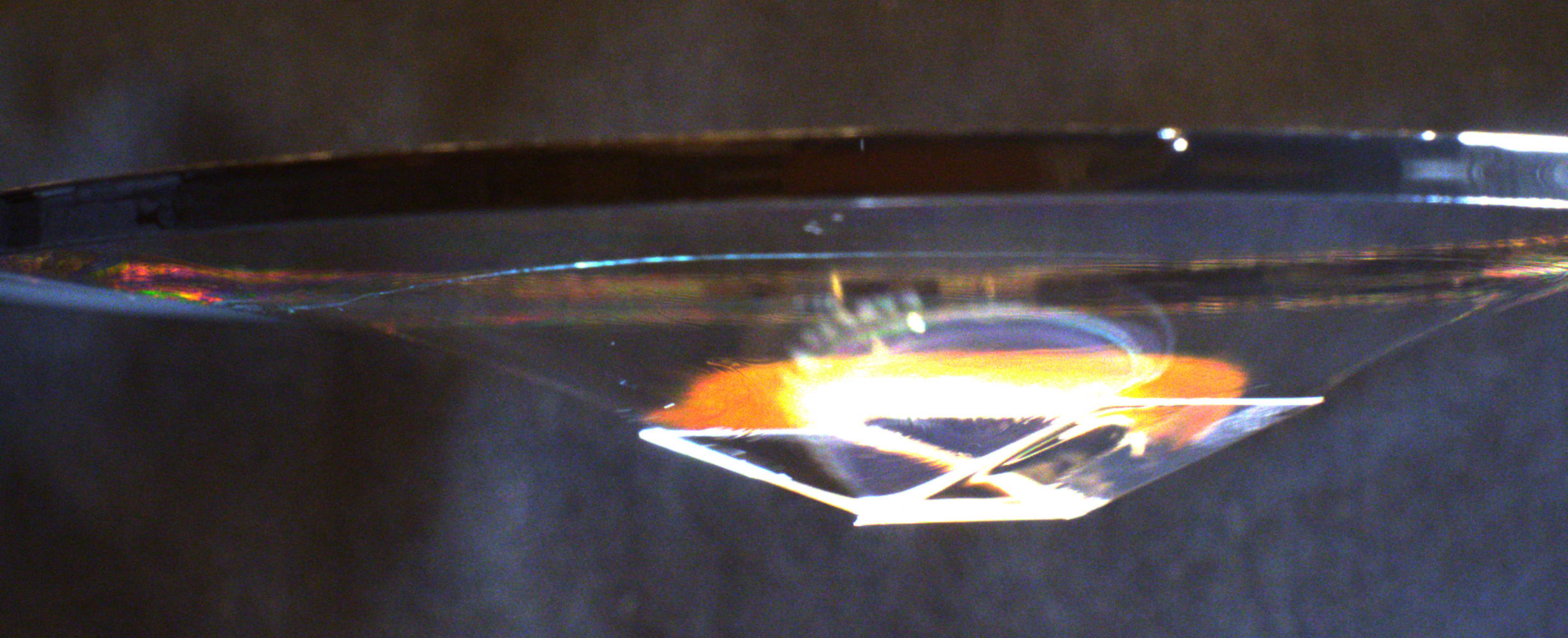
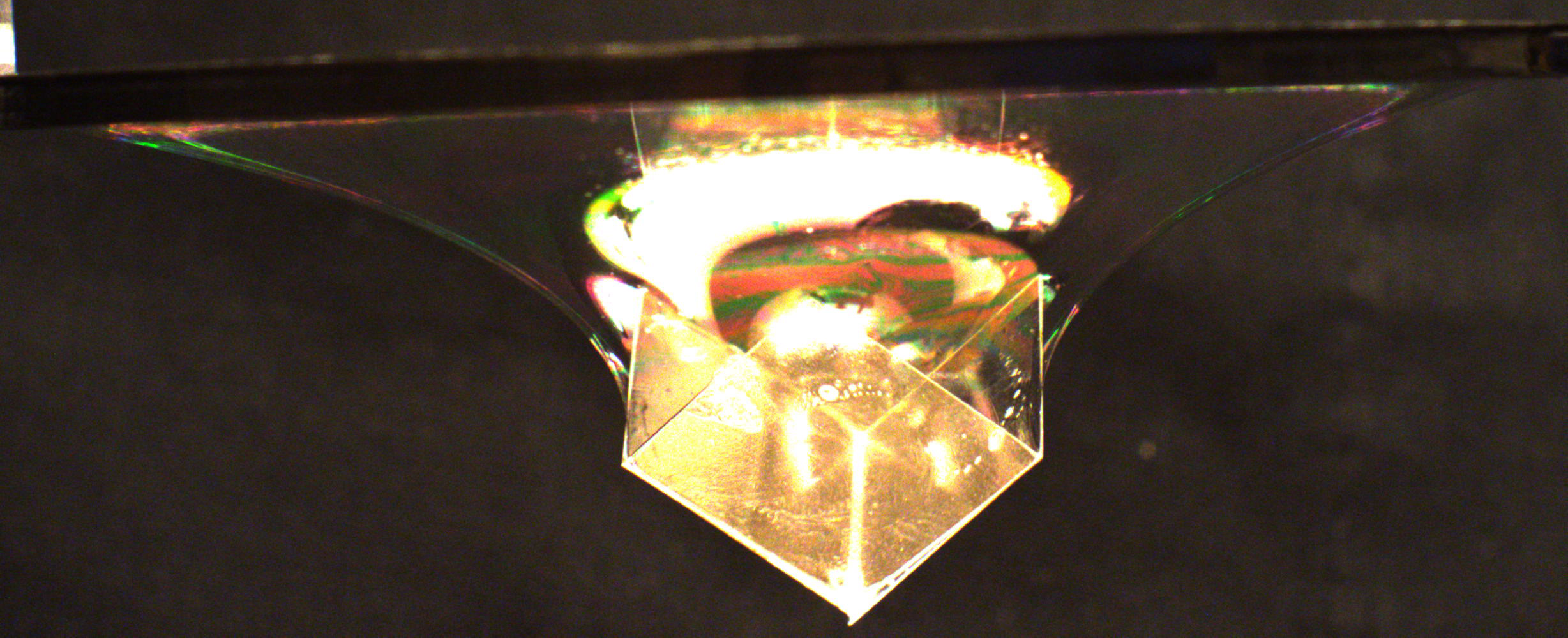
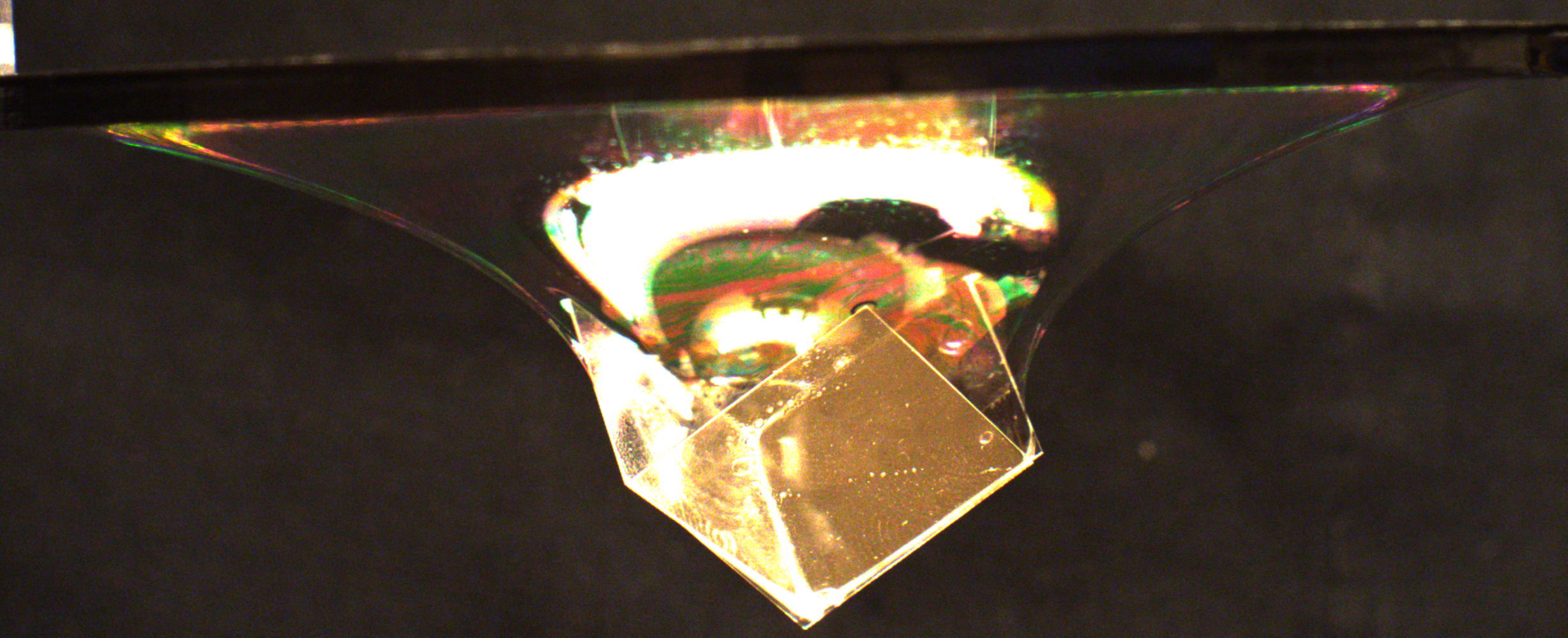
Analogous Soap Film Experiments
\(90^{\circ}\)
\(85^{\circ}\)
\(80^{\circ}\)
\(55^{\circ}\)
A glass cover slip (dimensions 18x18 mm and 0.15 mm thick) piercing a soap film at different relative angles.
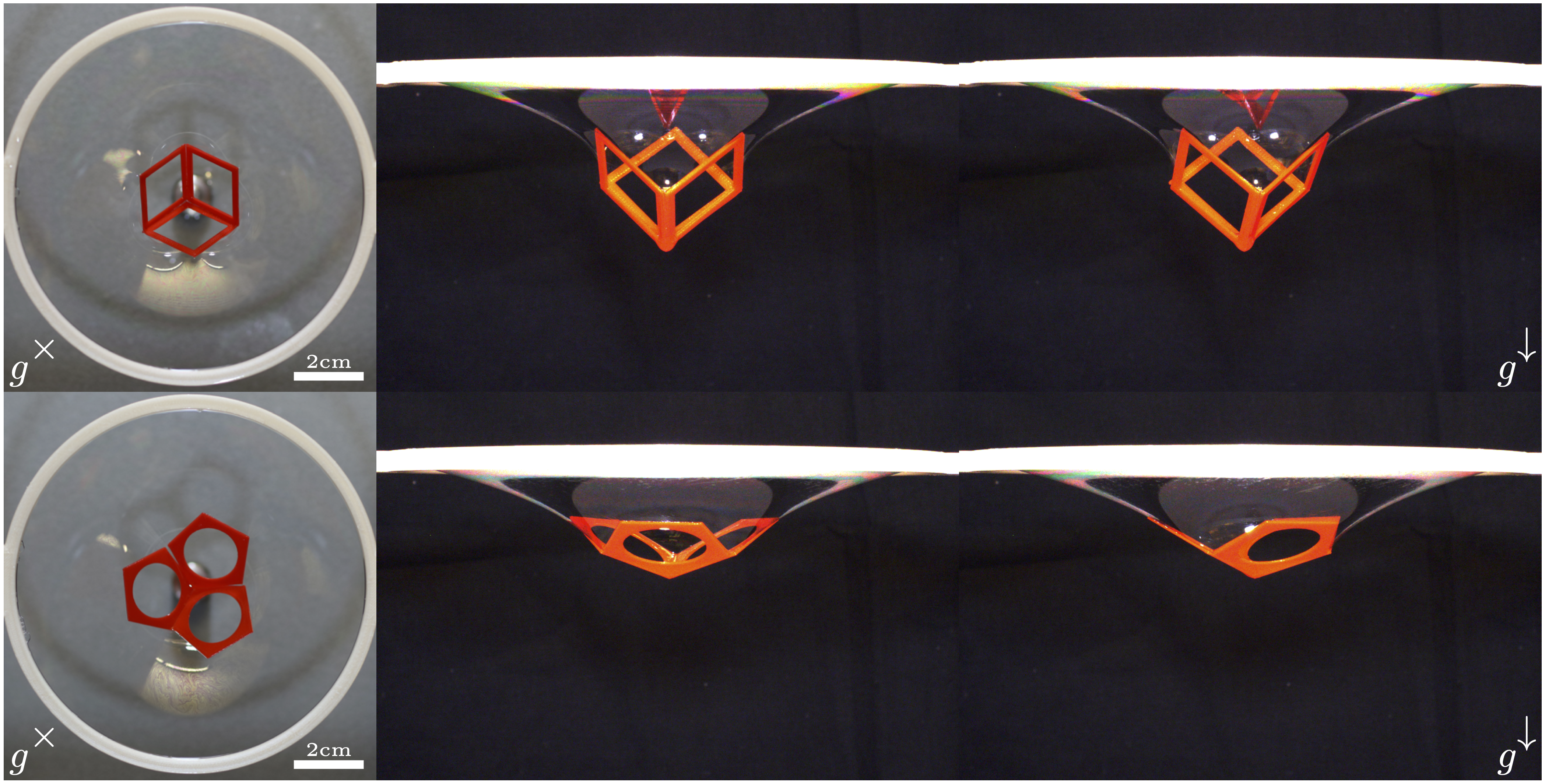
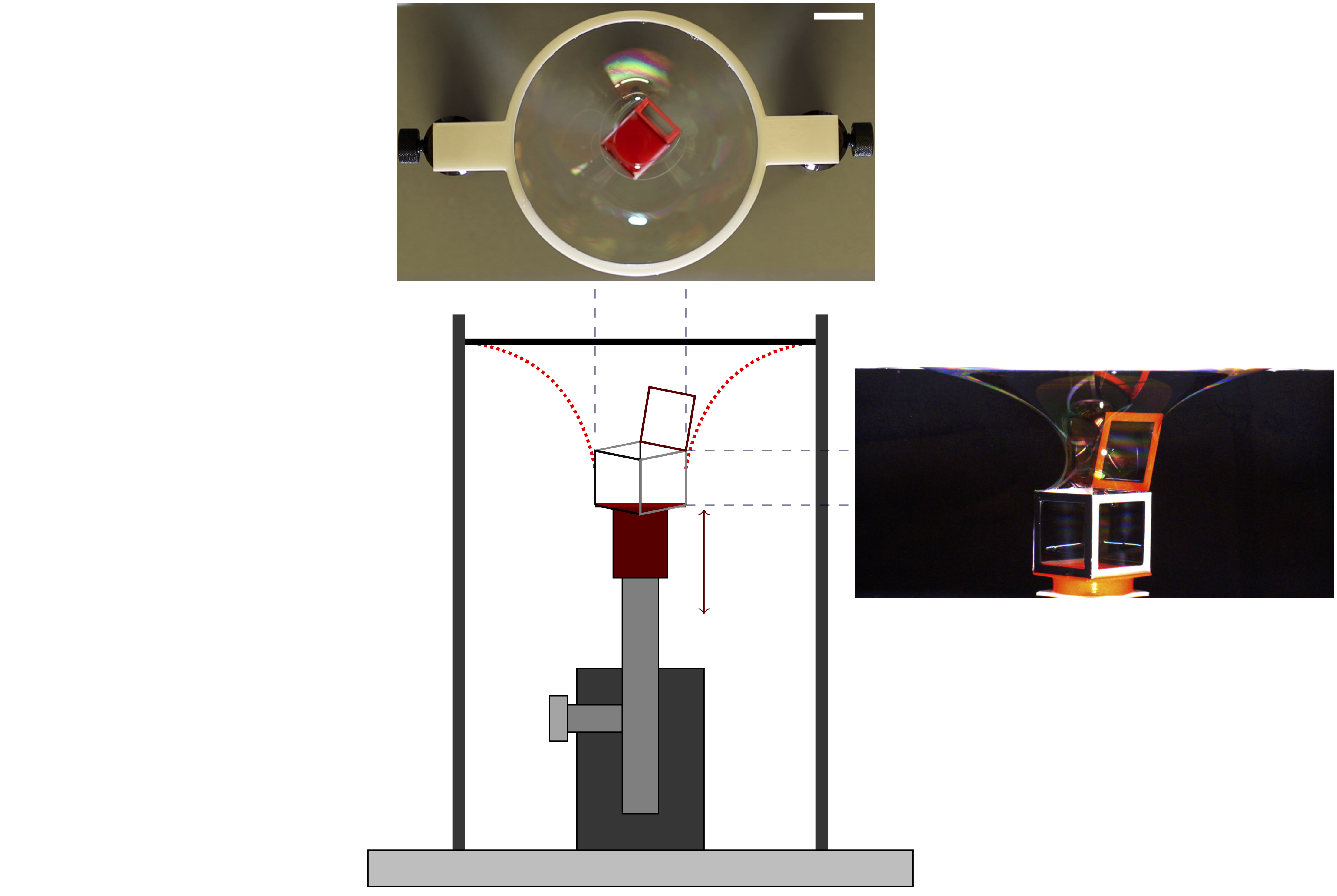
First Gravity Mediated Assembly
Gravity mediated assembly process
Davies, October 2018
Davies and Raufaste, June 2021
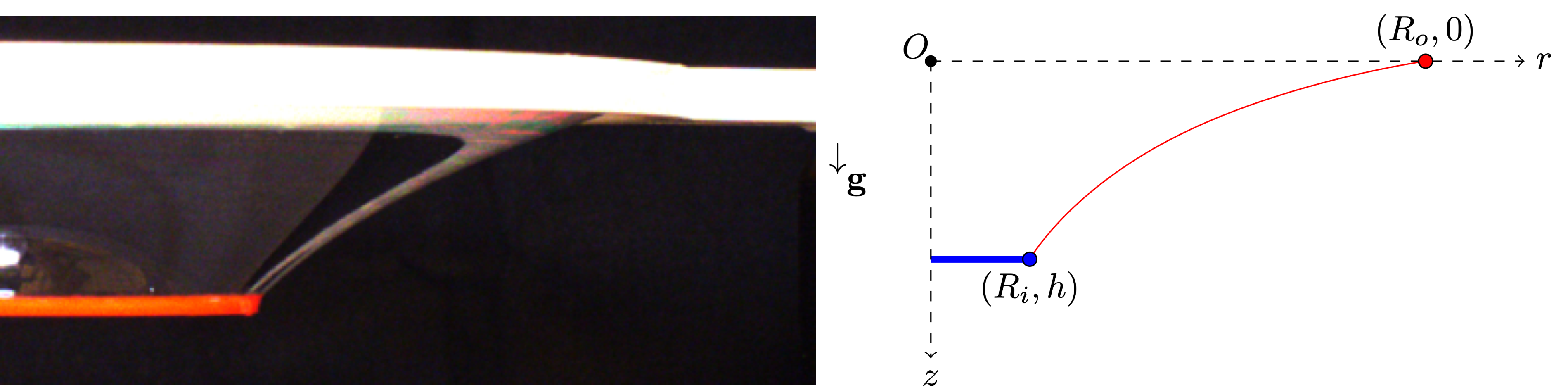
Catenoid
\[
y = a \cosh \left( \frac{x}{a} \right)
\]
Goldstein et al. September 2021
Raufaste et al. June 2022
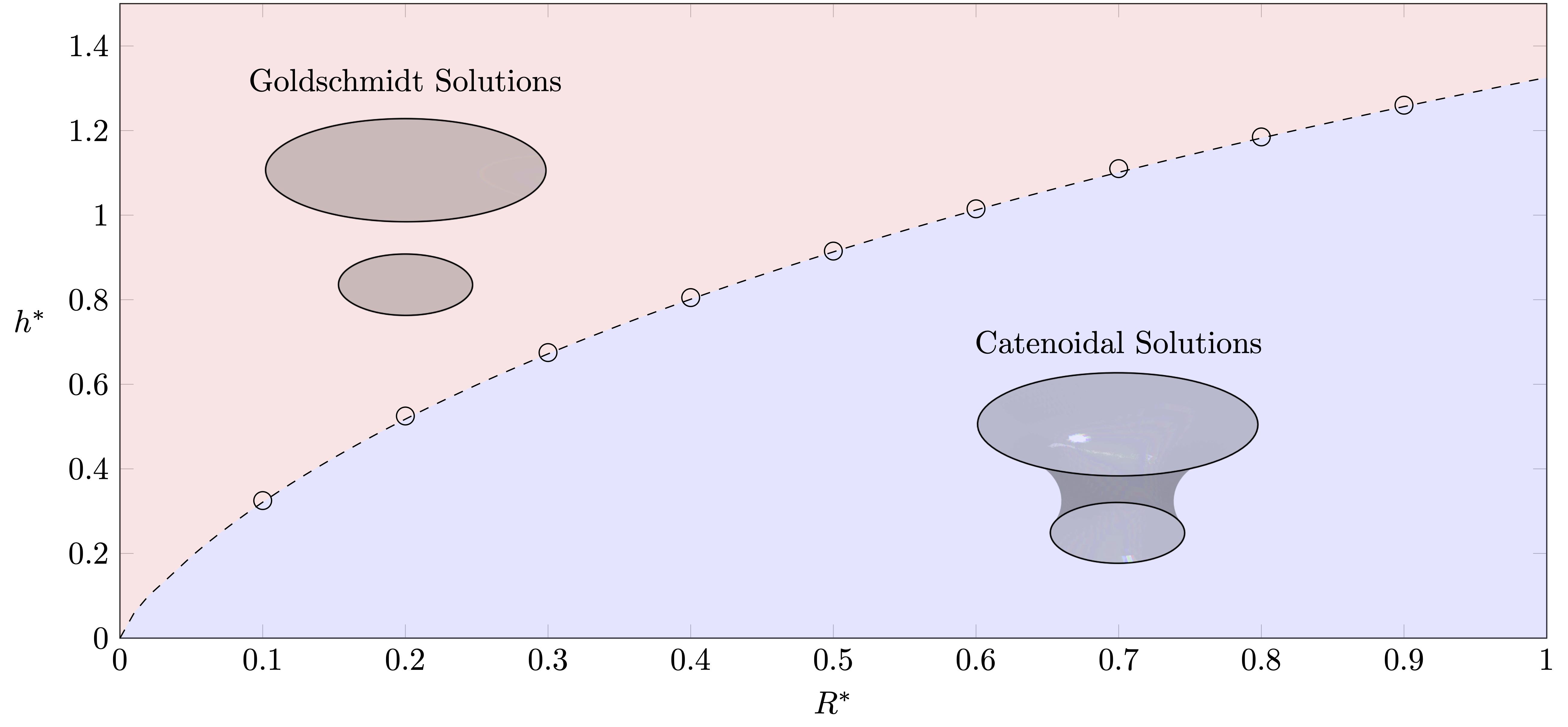
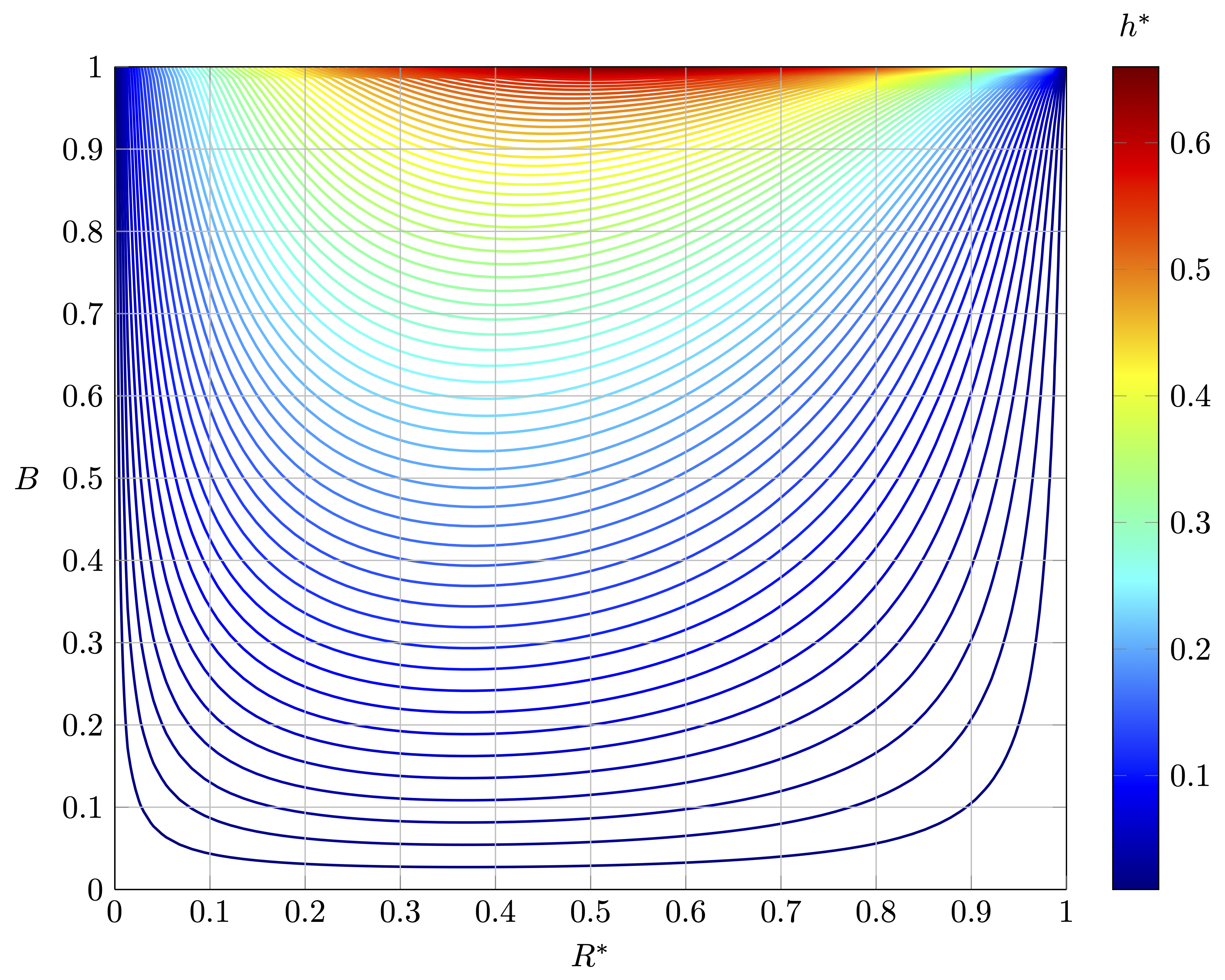
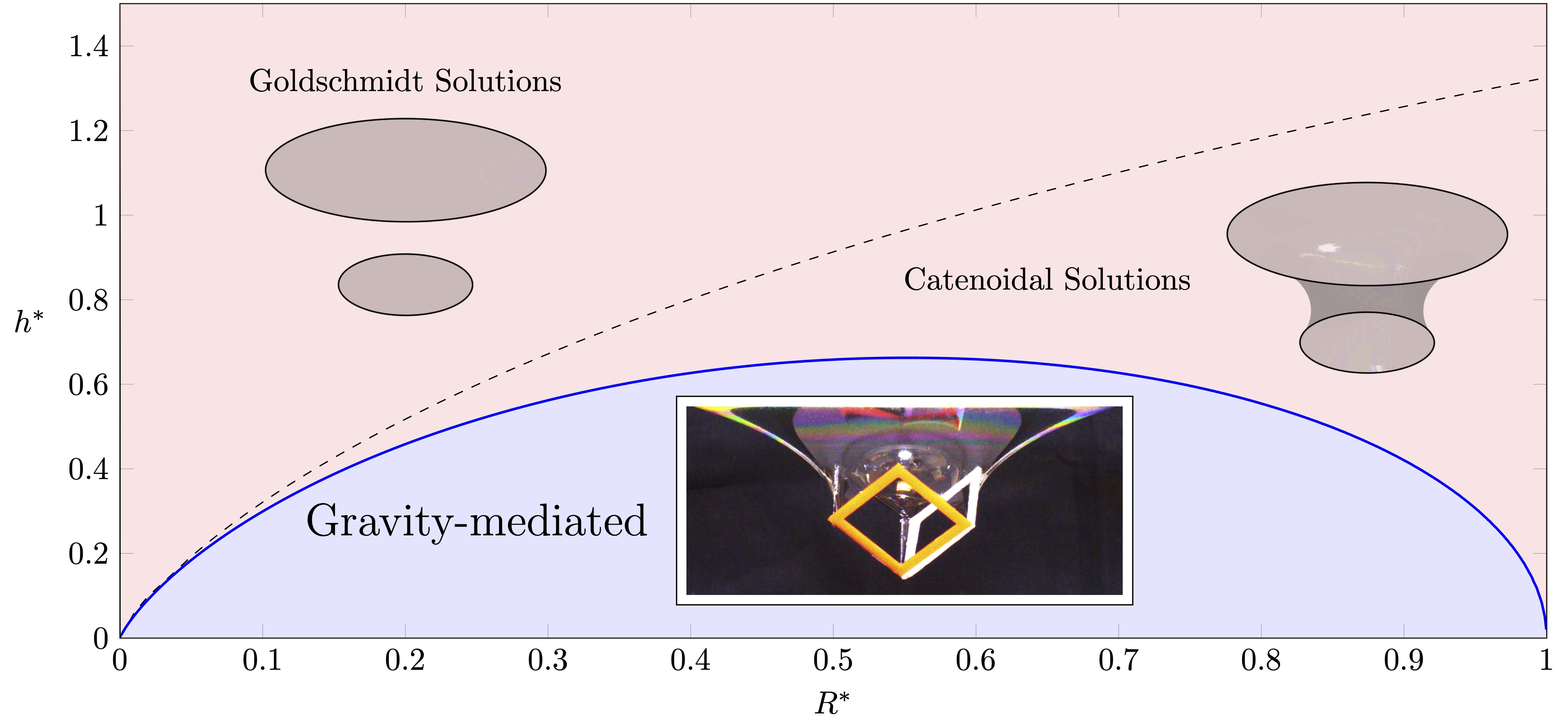
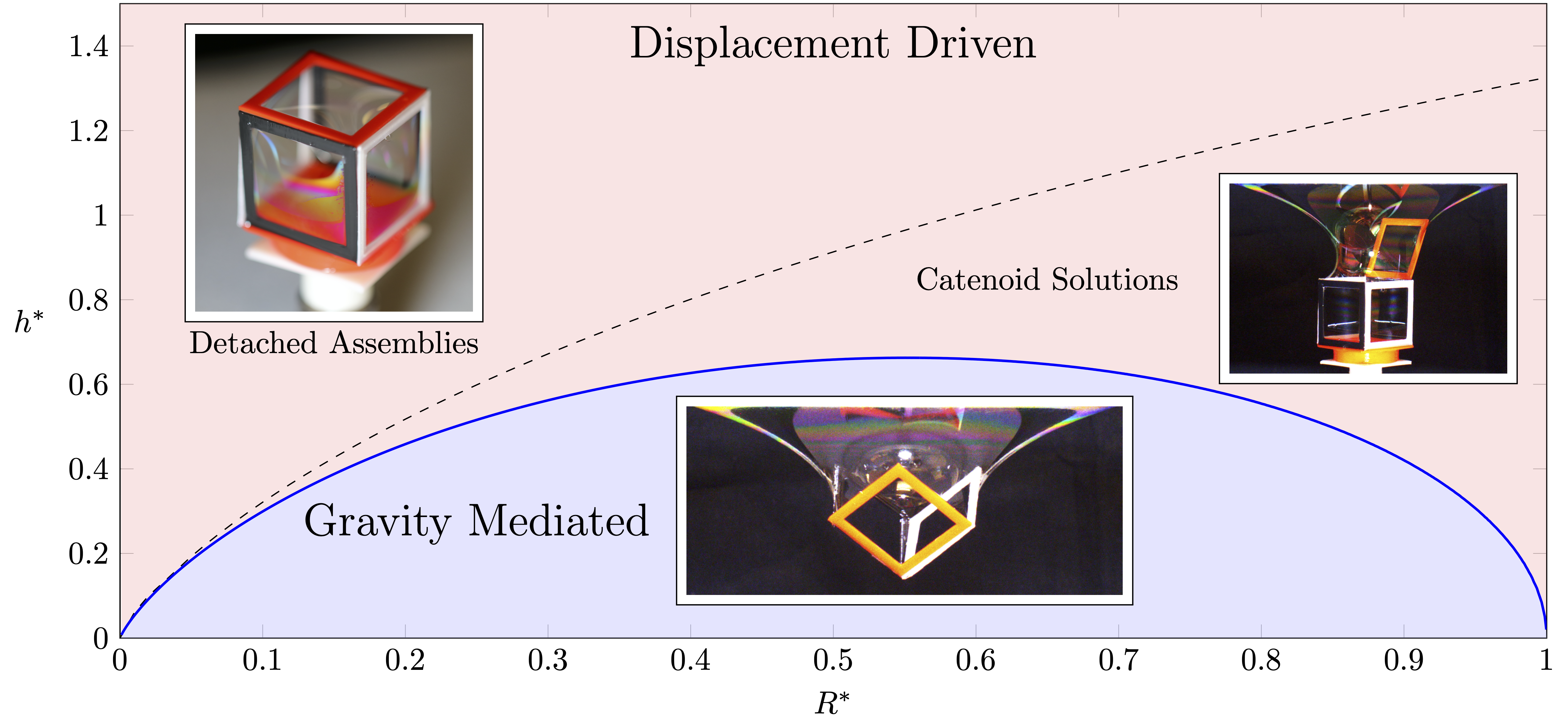
Goldschmidt solutions
The red region represents combinations of R* and h* yielding Goldschmidt solutions,
and in blue are pairs for which a catenoid solution exists.
The inset images are simulation results for R*=0.5 and h*=0.91, 0.915
corresponding to catenoidal and Goldschmidt solutions.
Calculus of variations formulation
\[
\begin{align}
\mathcal{E} (R,h) &= \int_{0}^{l}2 \sigma( 2\pi R) ds - m g h \nonumber\\
&= \int_{0}^{h}\left[ 4\pi\sigma R\sqrt{1 + (R')^2}\right] \,dz - m g h \nonumber
\end{align}
\]
Variations \(R+\epsilon\eta\) and \(h+\epsilon k\) are considered for some
parameter \(\epsilon\ll1\)
with two constraints on the variations.
The first-variation condition for the energy functional can be written as
\[
\begin{equation}
\scriptsize{
0=\bbox[5px, border: 2px solid red]{\int_{0}^{h} 4\pi\sigma \eta \left[ \sqrt{1 + (R')^2} - \frac{\mathrm{d}}{\mathrm{d} z} \left(\frac{R R'}{\sqrt{1 + (R')^2}}\right)\right] \,dz}
+ \bbox[5px, border: 2px solid blue]{ k\left[ 4\pi\sigma R_i\sqrt{1 + (R'(h))^2} - mg - \frac{4 \pi \sigma R_i (R'(h))^2}{\sqrt{1 + (R'(h))^2}} \right]}
}
\end{equation}
\]
with the following corresponding terms of the boundary value problem
\[
\begin{equation}
\bbox[5px, border: 2px solid red]{0 = 1 + R'(z)^2 - R(z)R''(z)}
\end{equation}
\]
Evaluating the above equation at \((R_i,h)\) and solving for \(h\) yields
\[
\begin{equation}
h = \frac{mg}{4\pi\sigma}\left[ \cosh^{-1}\left(\frac{4\pi\sigma R_i}{mg}\right)-\cosh^{-1}\left(\frac{4\pi\sigma R_o}{mg}\right)\right]
\end{equation}
\]
Letting \( R^*=R_i /R_o \) and \( h^*=h /R_o \) in addition to \(B=mg/ 4\pi\sigma R_i\)
\[
\begin{equation}
\bbox[5px, border: 2px solid red] { h^* = B R^* \left(\cosh^{-1}\frac{1}{B}-\cosh^{-1}\frac{1}{B R^*}\right) }
\end{equation}
\]
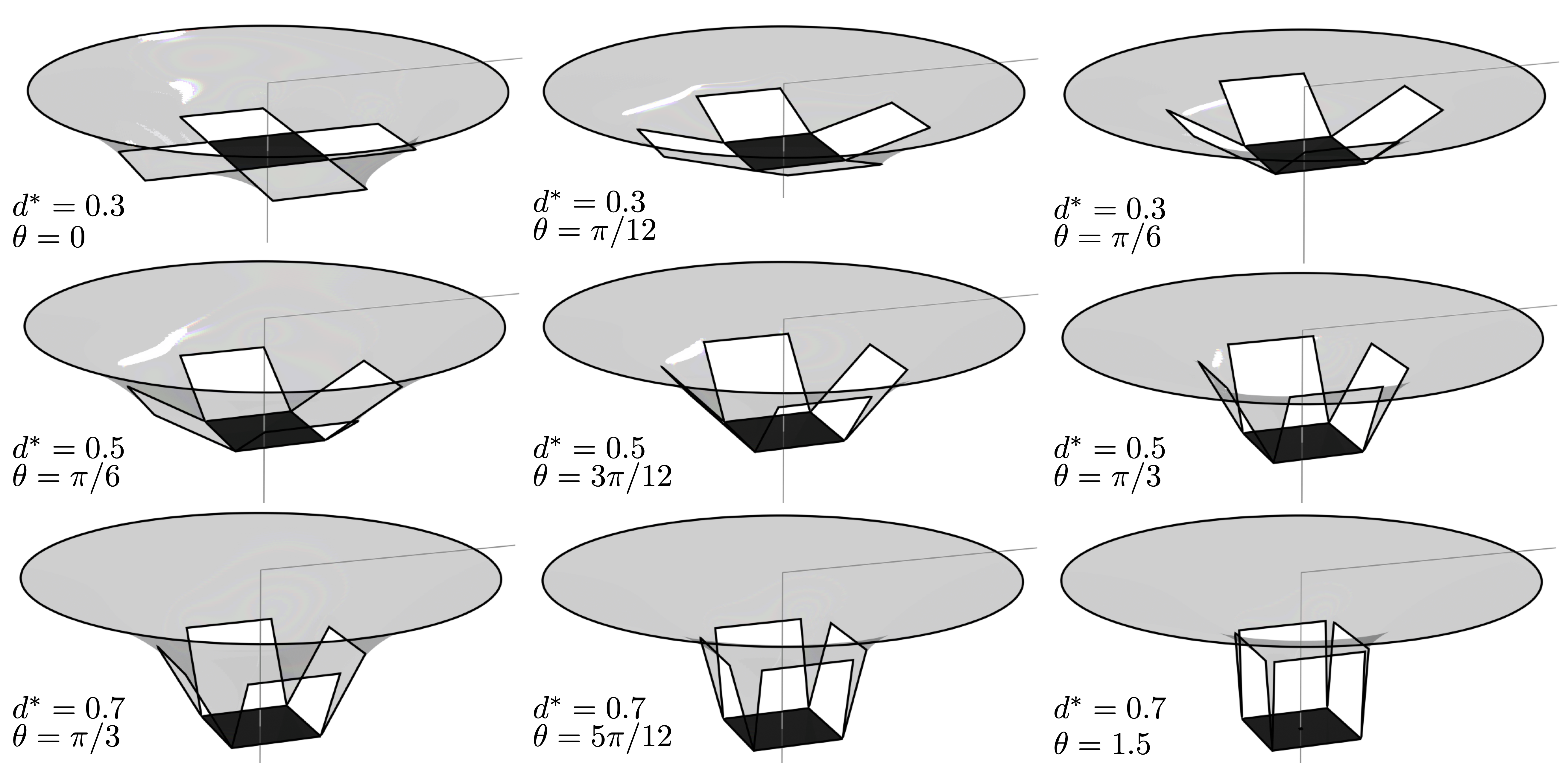
Surface Evolver simulations of transient tile angles
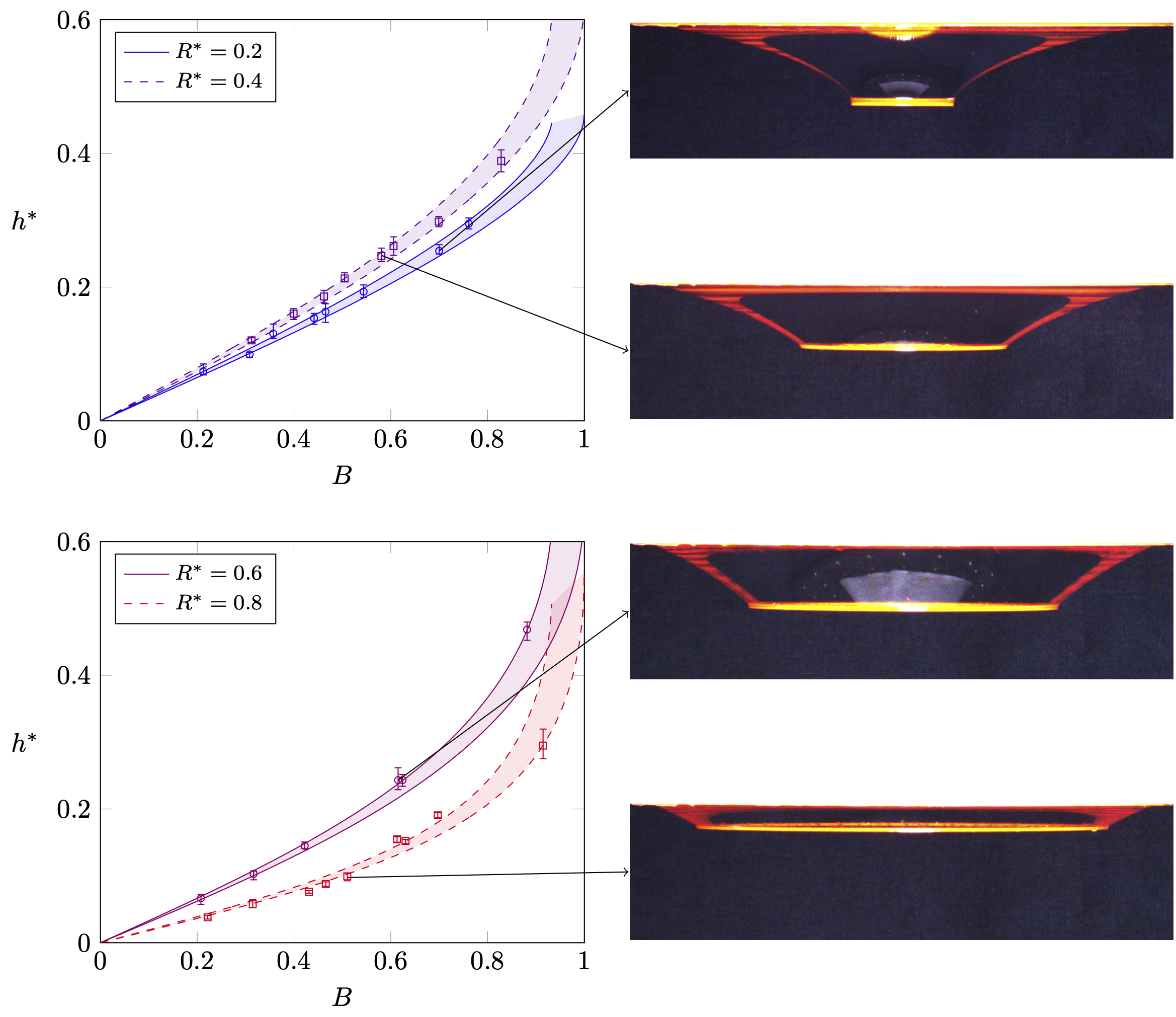
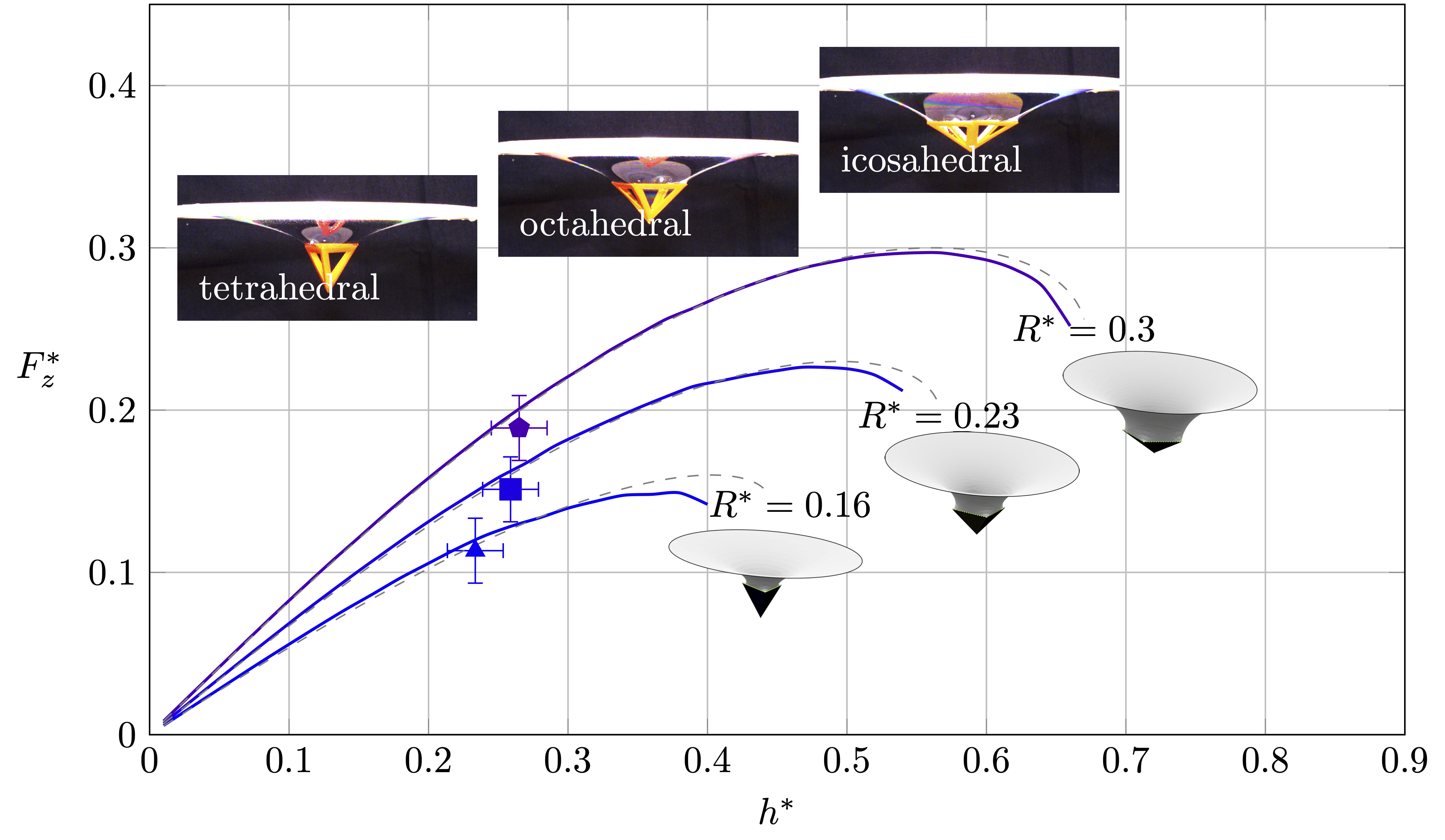
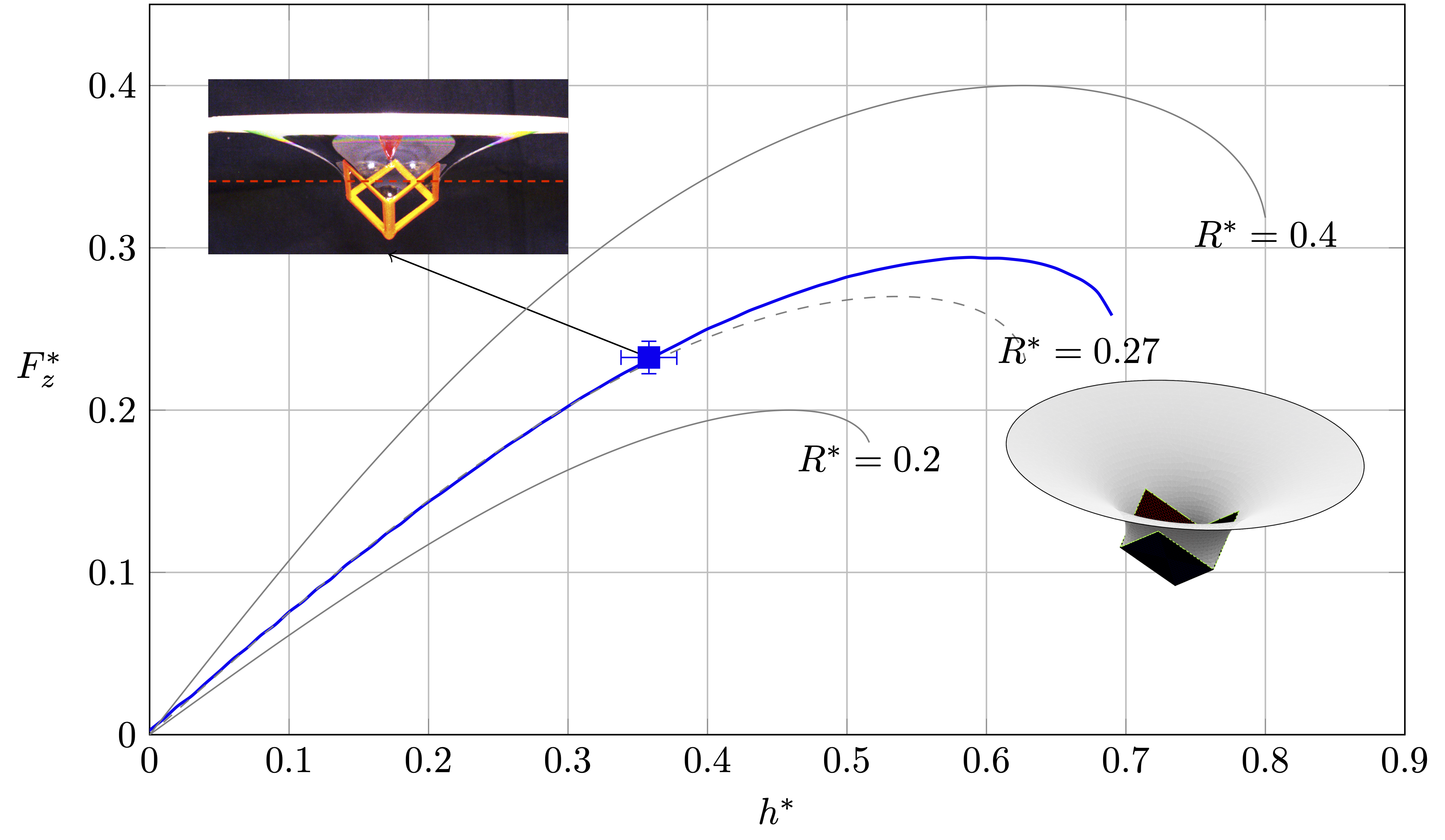
Surface Evolver simulations compared to experimental results
Addition of mathematical model
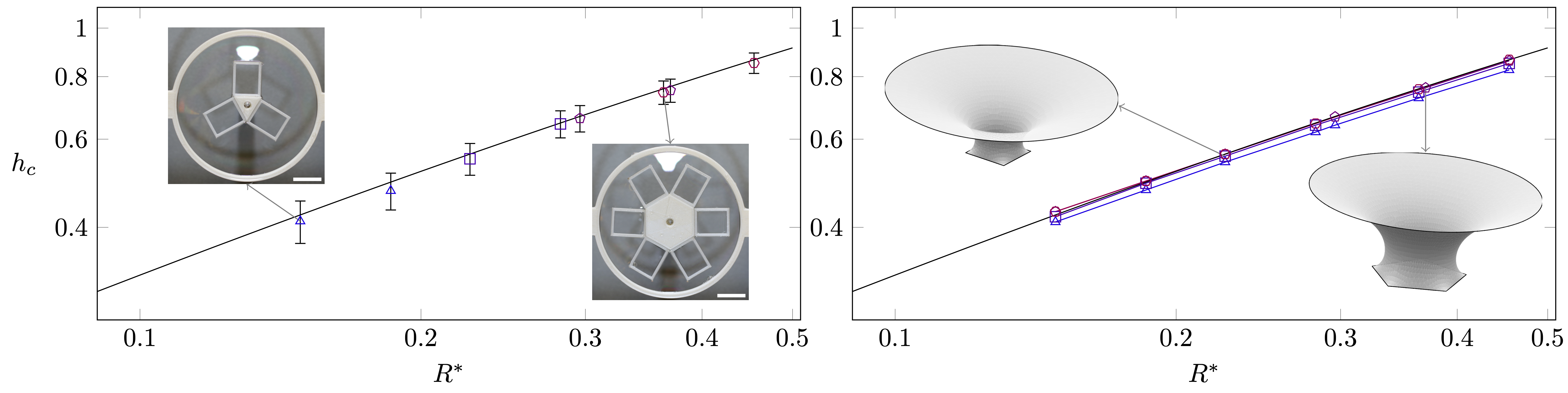
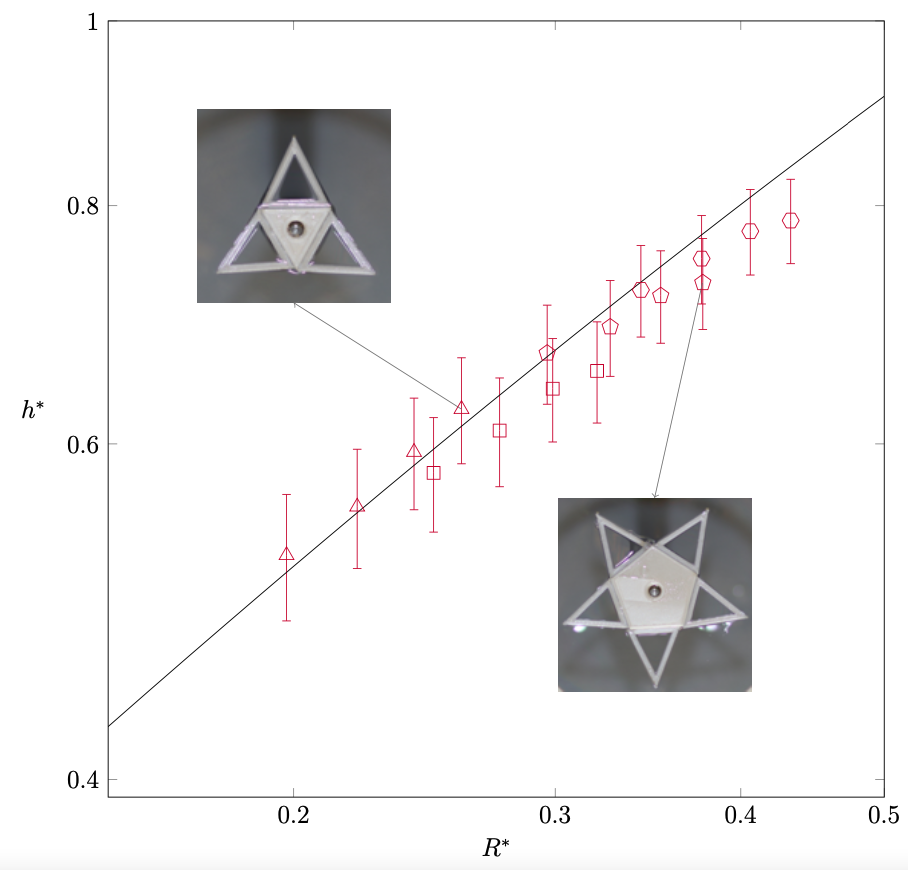
Effective radius for prismatic pinch-off
Effective radius for pyramidal pinch-off
Soap film mediated assembly
Additional geometries
Thank you!
Thank you!
ありがとうございます
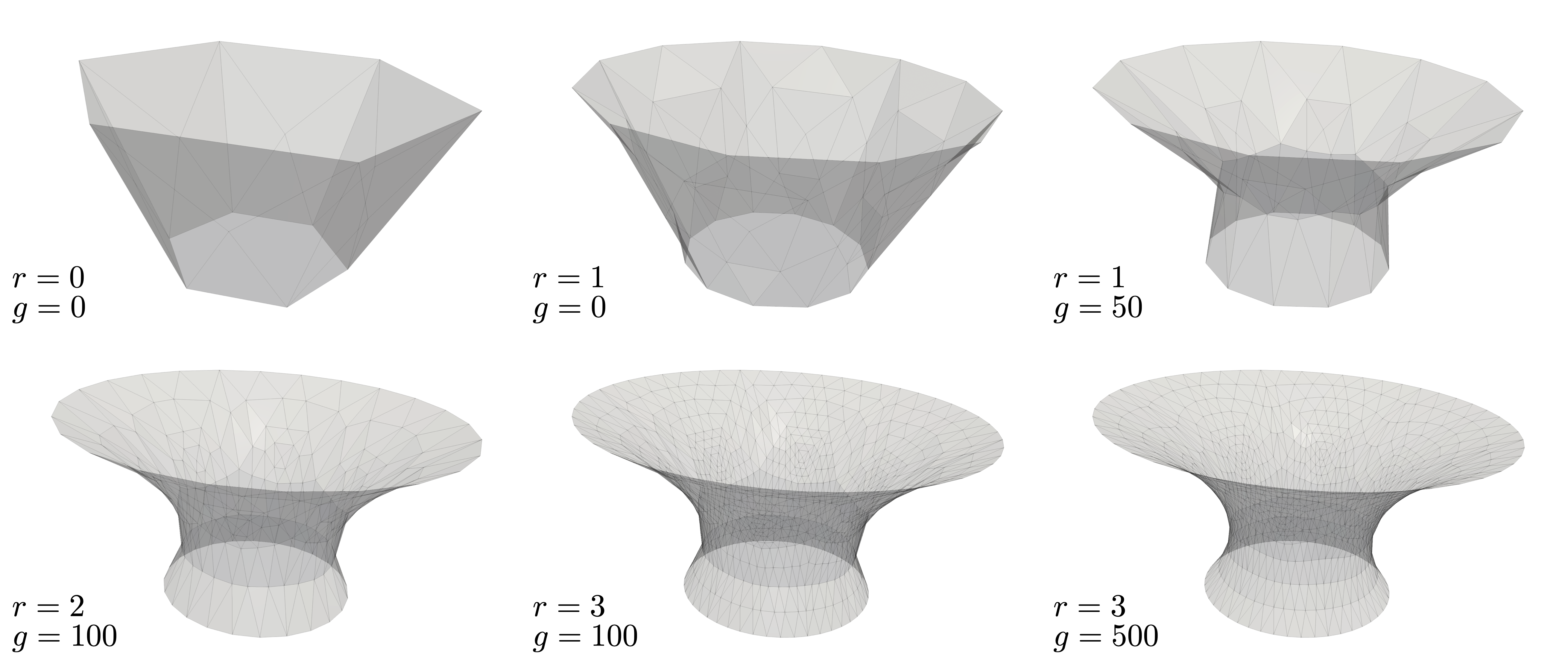
Surface Evolver simulations
Examples of refinement (r) and iteration (g) operations
within a Surface Evolver simulation of a catenoid where R*=0.5 and h*=0.9.
Calculus of variations formulation continued
Let \(\mathcal{F}\) be defined by \(\mathcal{F} ( \epsilon) =\mathcal{E}(R+\epsilon\eta,h+\epsilon k)\)
\[
\begin{align}
\mathcal{F} &= \int_{0}^{h + \epsilon k}\left[ 4\pi\sigma (R+\epsilon \eta)\sqrt{1 + (R'+\epsilon \eta')^2} \right] \,dz - mg(h+\epsilon k) \\
\end{align}
\]
Granted that R and h correspond to a minimum of the potential energy functional, the Gateaux derivative of \(\mathcal{F} \) must vanish at \(\epsilon=0\):
\[
\begin{equation}
\frac{\mathrm{d}\mathcal{F}(\epsilon)}{\mathrm{d}\epsilon}\bigg|_{\epsilon=0}=0
\end{equation}
\]
Two constraints on the variations arise from the boundary conditions
\[
\eta (0) = 0 \qquad \qquad \eta (h) = -k R'(h)
\]
Verification of Surface Evolver simulations
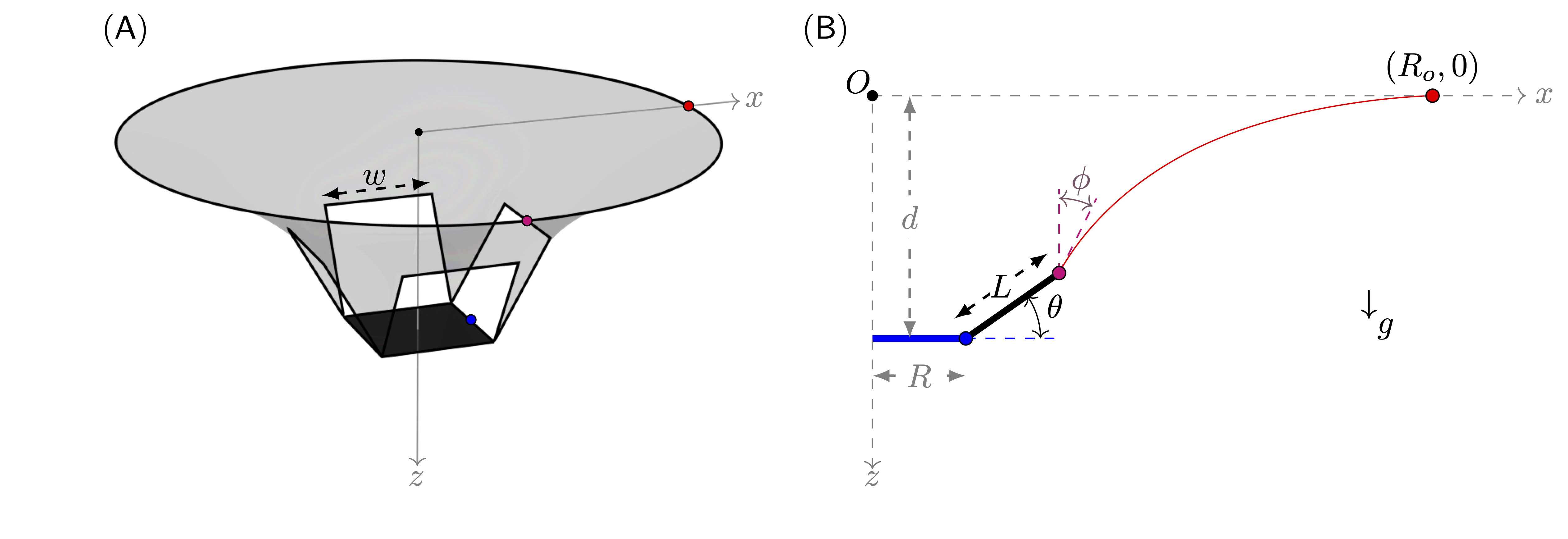
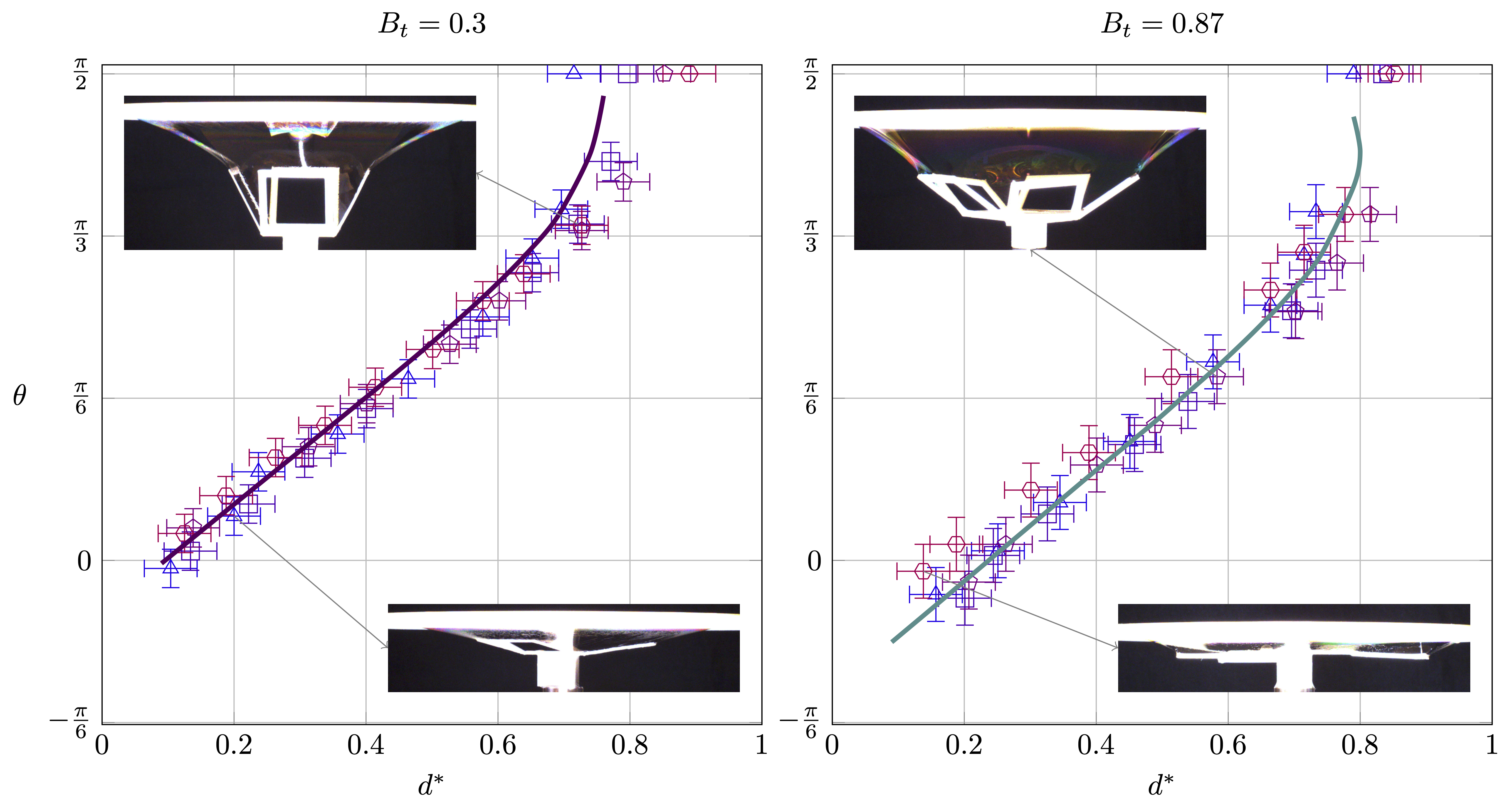
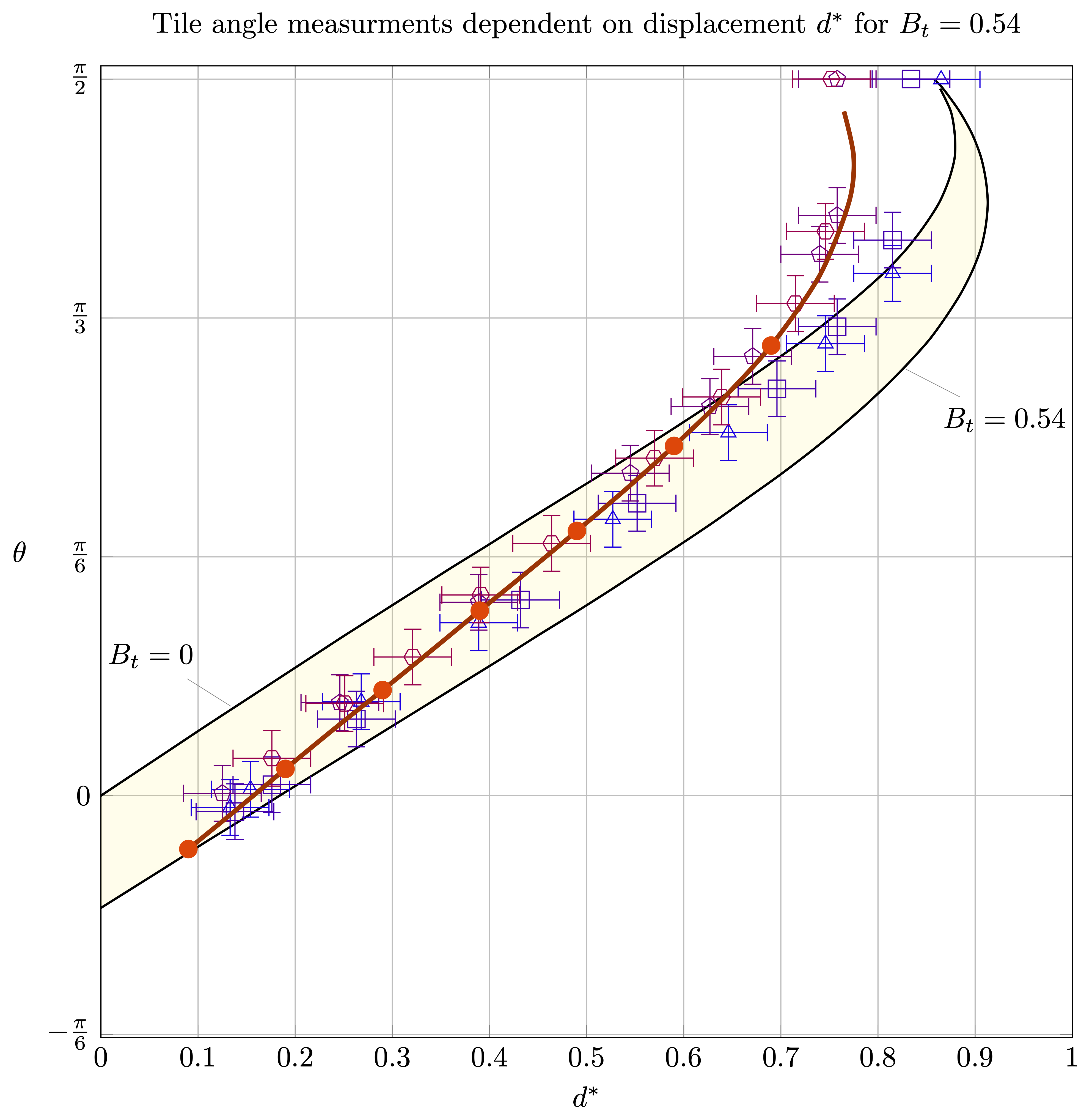
Model of transient tile angle
The equilibrium condition \(\mathcal{T}_g=\mathcal{T}_\sigma \) can be expressed as
\[
\begin{equation}
B_t = \frac{mg}{4 w \sigma}=\frac{\cos(\phi+\theta)}{\cos\theta}
\end{equation}
\]
Under the assumption that a cross-section of the soap film can be represented as a catenary curve
\[
\scriptsize{
\begin{equation}
d^* = (R^*+L^*\cos\theta) g(B_t,\theta)\Big[ \cosh^{-1} \left(\frac{1}{g(B_t,\theta)}\right) -
\cosh^{-1} \left( \frac{1}{ (R^*+L^*\cos\theta) g(B_t,\theta) }\right) \Big] + L^*\sin\theta
\end{equation}
}
\]
where the function \( g(B_t,\theta) \) is given by
\[
\begin{equation}
g(B_t,\theta)=\cos[\cos^{-1} ( B_t\cos\theta)-\theta], \qquad 0\le B_t\le1.1547, \qquad -\frac{\pi}{6}\le\theta\le\frac{\pi}{2}
\end{equation}
\]
Transient tile angle experiments
Competition between torques due to gravity and surface tension
Surface Evolver simulations compared to experimental results